旷谷
幽谷空旷,唯机械朝夕而作 无人,无险,旷古而烁今
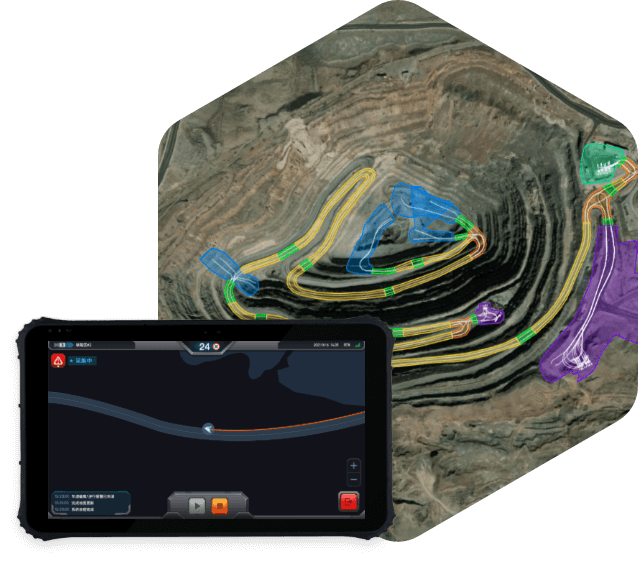
踏歌智行露天矿无人驾驶运输解决方案“旷谷”由车载系统、地面系统、云控平台组成。系统以露天矿为主要应用场景,基于车、地、云高效协同作业,为客户提供全栈式无人运输解决方案,助力露天矿区的无人化、智能化发展。
 车载系统
车载系统车载硬件部署

环境感知
Lidar+Randar+Camera

高精度定位
GNSS+IMU
无线通讯
V2N+V2V

车载主机
双M-Box + V-Box
车载系统车载硬件部署

环境感知
Lidar+Randar+Camera

高精度定位
GNSS+IMU
无线通讯
V2N+V2V

车载主机
双M-Box + V-Box
车载系统车载硬件部署

环境感知
Lidar+Randar+Camera
高精度定位
GNSS+IMU
无线通讯
V2N+V2V
车载主机
双M-Box + V-Box
车载系统车载硬件部署
环境感知
Lidar+Randar+Camera

高精度定位
GNSS+IMU
无线通讯
V2N+V2V

车载主机
双M-Box + V-Box
功能亮点
系统具备开机自检、通讯监测、故障诊断、作业任务执行等功能
循迹行驶过程中可实现自主的安全避障停车、绕行或骑行,保证高效作业
车载感知实现360°无死角,有效感知范围最远超过100米,稳定识别最小障碍物尺寸为30厘米×30厘米
在通讯、定位、制动、感知和控制等多方面进行冗余配置,保证车载系统安全运行
地面系统路侧协同系统
路侧协同系统可对矿区4G/5G 蜂窝网络薄弱的区域进行网络补盲和冗余通讯,且其感知功能可以对路侧周边矿区环境进行全天候检测并及时上报环境变化,路侧单元V2I通讯有效覆盖范围500米。


远程接管系统
远程接管系统可对车辆进行远程接管,保障无人驾驶运输系统的持续作业。
传输低延时:控制指令延时≤50ms,视频传输延时≤100ms
操控完整:转向、制动、油门、举升、档位等
车辆状态数据呈现:支持车辆全量状态参数和周围视频显示
协同作业系统
协同作业系统是为有人驾驶协同车辆及露天矿作业人员配备作业管理系统,包括车载协同终端和便携式协同终端,与无人驾驶卡车协同完成装运卸全流程运行作业。
采装协同终端
上报设备状态与定位、接收采掘任务及路线、管理无人卡车装载过程的驶入驶离、无人卡车行车安全监控

排土协同终端
接收排土任务、与无人卡车进行分区安全作业、排土场边界采集更新

通用协同终端
接收清障、洒水、整修道路等任务,车车碰撞预警、路口通行禁行提醒

地图采集终端
现场道路及作业区边界高效采集和上传、障碍物大小及范围采集上报
便携协同终端
现场道路及作业区边界高效采集和上传、障碍物大小及范围采集上报

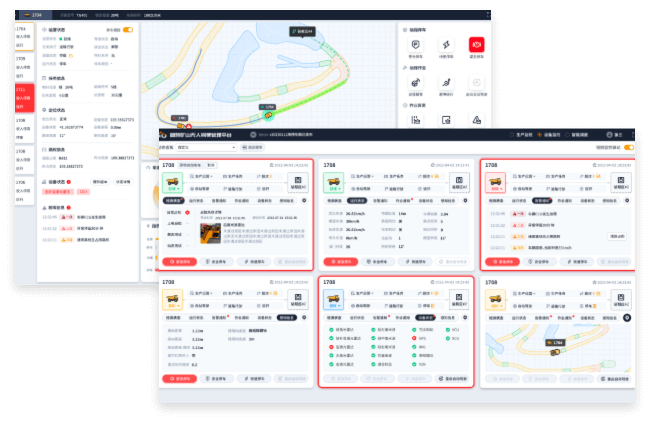
无人驾驶调度指挥平台管控露天矿无人驾驶生产运输全流程,承载着生产监控和调度指挥的核心职能,可对全矿设备进行高效调度和实时监控。同时支持私有云、公有云、本地化部署方式,具备优良的兼容性和可扩展性。
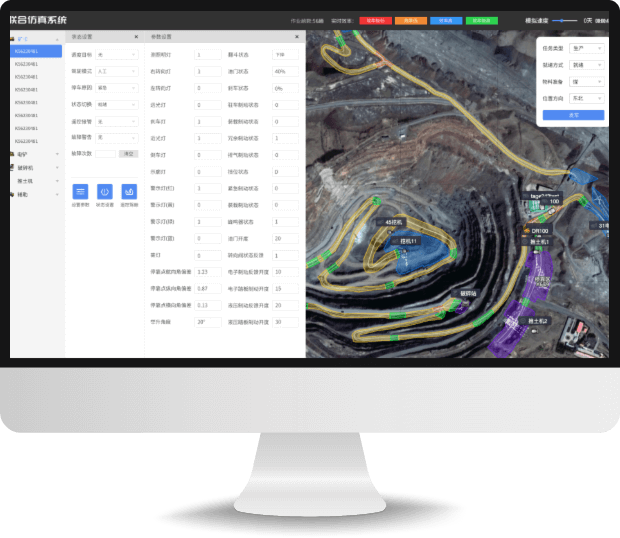
联合仿真系统
多维度复杂系统联合仿真,综合系统仿真测试、硬件在环仿真测试以及联合仿真技术,通过对矿区环境、实车车况、传感器等进行1:1建模,对调度算法、路权控制算法、感知算法等进行逻辑验证,根据客户实际需求全方位高效测试无人驾驶系统,同时加快研发与迭代。
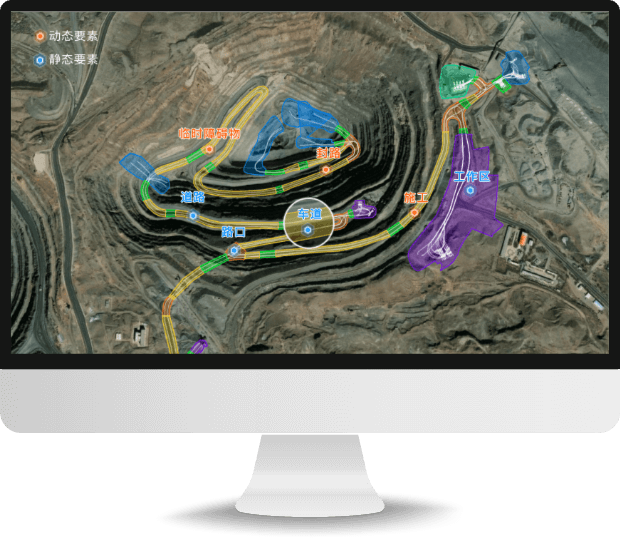
高精地图
地图要素全,动静态地图要素分层模型,包含20+静态要素及动态交通事件;地图更新效率高,支持可行驶区边界自动化提取、融合更新。